Moteurs d'aiguilles à base de servo-moteurs pour radiocommande
Au tout début, j'avais équipé mon réseau HO analogique de moteurs d'aiguilles constitués de relais téléphoniques 48 Volts placés sous le plan de roulement.
Ces relais industriels, très solides sont munis de plusieurs contact repos / travail permettant toutes sortes de commutations, dont l'alimentation des pointes de cur.
Puis j'ai digitalisé ce réseau, mais comme mes relais étaient déjà installés (38 au total) et que je n'avais pas trop envie de tout changer, j'ai donc fabriqué des décodeurs d'accessoires à base de PIC16F84 avec sorties sur transistors Darlington 50 Volts destinés à commander directement les bobines de ces relais. Le 16F84 commande 4 x 2 sorties, soit 8 sorties. Dans le cas de mes décodeurs, 1 seule sortie sur les 2 était utilisée.
- sortie activée = bobine alimentée et donc relais au travail,
- sortie désactivée = bobine non alimentée et donc relais au repos.
En exploitation, tout fonctionnait parfaitement mais j'ai très vite été fatigué d'entendre les relais claquer à tous bouts de champs. En mode automatique de gestion d'itinéraires, sous Windigipet en l'occurrence, chaque itinéraire commuté provoquait des rafales de mitraillettes insupportables !
De plus, en cas de plantage système (bug rédhibitoire de l'Intellibox !!!), le DCC se coupe et tous les relais, éléments monostables par définition, retombent en position repos ce qui rend la réinitialisation aiguille après aiguille, très fastidieuse.
J'ai donc décidé d'y remédier et je me suis tourné vers les moteurs lents qui sont disponibles dans le commerce mais devant l'encombrement, le bruit de fonctionnement et le prix de certains (je ne citerai pas de marques !), je me suis orienté vers une autre solution, et je ne suis pas le seul : utiliser des servo-moteurs destinés à la radiocommande et fabriquer des moteurs d'aiguilles à partir de ces servo-moteurs.
En effet, j'ai pratiqué aussi dans le passé la radiocommande de modèles réduits divers, j'avais été séduit par la qualité de ces petits concentrés de technologie et par la précision des commandes qu'on pouvait en attendre. Leur prix était néanmoins non négligeable mais, comme souvent en électronique, les tarifs ont heureusement considérablement baissé depuis et on trouve aujourd'hui en Europe dans les magasins de modélisme, sur des sites spécialisés et même à Hong Kong par exemple, des micro servo-moteurs pour hélicoptères électriques qui sont tout à fait adaptés à la commande de nos aiguilles. De plus, leur très petite taille permet de placer partout sans problème.
Naturellement, les servo-moteurs peuvent être utilisés tel quels, mais une adaptation mécanique reste préférable pour que le déplacement du servo-moteur puisse commander la tirette de l'aiguille correctement.
Quant au fonctionnement obtenu, c'est le jour et la nuit : réglage de la vitesse et de l'angle de débattement, très faible consommation, très grande souplesse, couple très important permettant de commander n'importe quelle aiguille, y compris les plus " dures ", aucun incident de fonctionnement et le tout dans un silence quasi total, que demander de plus ?
Les aiguilles ont enfin un mouvement véritablement lent qui est un vrai plaisir à regarder fonctionner. C'est l'idéal à mon sens et c'est donc l'objet de cette description.
Le seul problème c'est qu'en plus des 38 moteurs installés, il m'a fallu aussi remplacer les décodeurs car le type d'ordres et la manière de traiter les informations en provenance de la centrale sont fondamentalement différents des décodeurs à 2 états de sortie.
En parcourant les forums sur le Net, et en me servant de l'expérience d'autres modélistes, j'ai réuni un tas d'infos utiles pour réaliser ces décodeurs construits autour d'un PIC 12F629.
Ces décodeurs deviennent du coup beaucoup plus simples et économiques et ne nécessitent qu'une poignée de composants.
Comme indiqué précédemment, par la programmation initiale du microcontrôleur, et modification ultérieure de certaines CV's, il est possible de définir la vitesse de déplacement et l'angle de débattement individuellement pour chaque servo-moteur, ce qui permet une souplesse d'adaptation à chaque type d'aiguille, sans commune mesure avec les moteurs précédents.
C'est évidemment un investissement, mais le jeu en vaut vraiment la chandelle.
Dans le présent article, je vous propose de confectionner des moteurs d'aiguilles équipés de ces servo-moteurs.
Je décrirai la réalisation des décodeurs et de leur programmation dans un article futur.
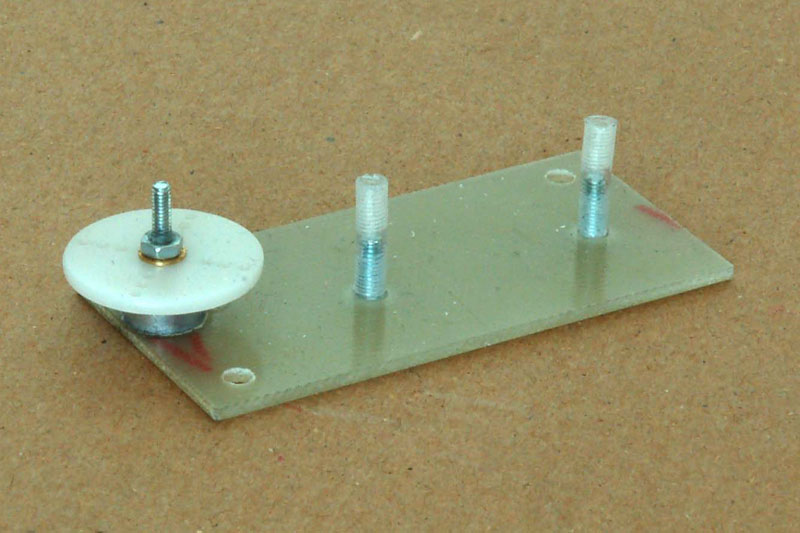
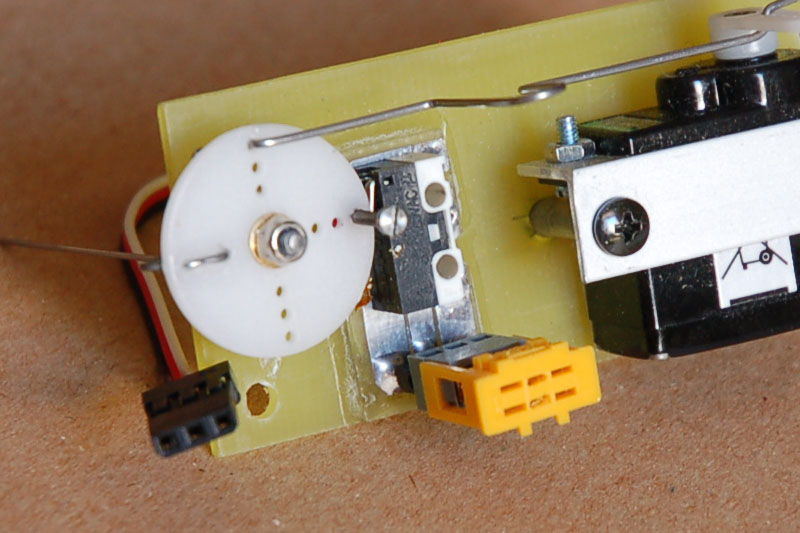
Avant de commencer, voilà donc à quoi ressemblent mes moteurs lents équipés de micro servo-moteurs :

- 1 micro servo-moteur équipé de son connecteur 3 broches à relier au décodeur,
- 1 petit étrier en dural à fabriquer,
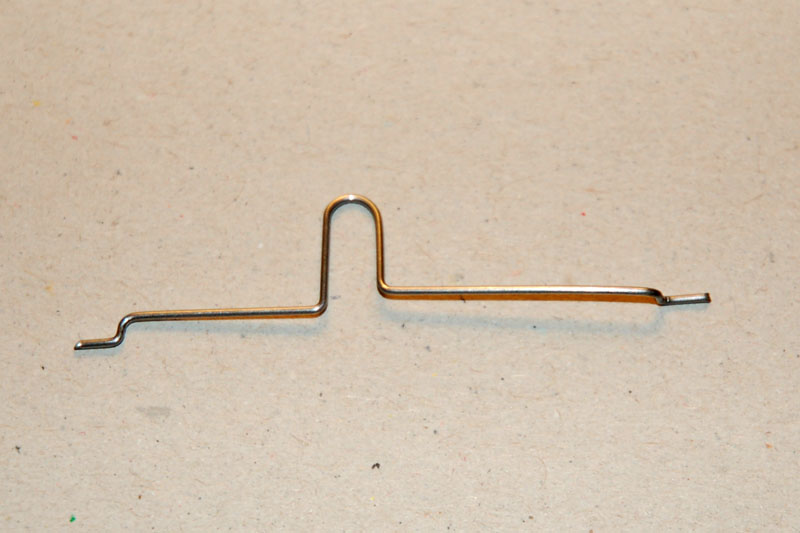
- 1 tringlerie de commande en corde à piano à fabriquer,
- 1 palier de palonnier de sortie à réaliser au tour,
- 1 palonnier de sortie monté sur son palier et sa tige de commande,
- 1 platine en époxy (circuit imprimé débarrassé de sa feuille de cuivre),
- 1 micro switch manuvré par une came (petite perle) montée sur le palonnier de commande de l'aiguille destiné à commuter la polarité du cur,
- 1 petit circuit imprimé à fabriquer recevant un connecteur mâle 3 broches,
- 1 connecteur femelle 3 broches à relier à la pointe de cur et aux rails,
- de la visserie de 1,6 mm, 2 mm et 2,5 mm.
Le premier travail consiste à découper les platines de 70 x 30 mm taillées dans de l'époxy 16/10èmes et d'y percer les 2 trous de 3 mm permettant la fixation du moteur sous la voie, les 2 trous de 2,5 mm de fixation de l'étrier et le trou de 2mm pour y introduire la vis support du palonnier de sortie.
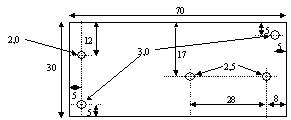
On tronçonnera des morceaux de 35 mm de long et on fera sur une des 2 faces une découpe de 22,5 x 10 mm destinée à recevoir le servo-moteur. On y percera ensuite les 2 trous de 2 mm de fixation du servo-moteur et les 2 trous de 2,5 mm de fixation de l'étrier sur la platine époxy.
Puis viendra la fabrication du palier du palonnier. Pour ceux qui possèdent un tour, le palier sera usiné dans du rond de dural aux cotes suivantes :


Les servo-moteurs sont livrés d'origine avec 3 palonniers en nylon interchangeables, un circulaire, un à 4 branches en étoile et un mono-branche.
Personnellement, j'ai choisi d'utiliser le mono-branche pour la sortie du servo-moteur et le palonnier circulaire pour la commande de la tirette d'aiguille. La liaison entre les deux palonniers est réalisée avec de la corde à piano de 8/10èmes de mm selon la forme représentée.
Les palonniers en nylon sont destinés à être montés sur le moyeu de sortie du servo-moteur. Ils disposent d'un alésage cannelé de 3,9 mm. C'est dans cet alésage que sera introduit le palier en dural. L'emmanchement devra être libre, mais suffisamment ferme pour éviter le jeu.
Il faudra aussi installer le micro switch et sa commande. Personnellement, j'utilise une petite perle décorative en verre qui vient pousser le levier du micro switch. Un des trous du palonnier circulaire est taraudé à 1,6 mm dans lequel prend place une vis de 1,6mm. C'est sur cette vis que sera enfilée la perle puis immobilisée par une goutte de cyanoacrylate.

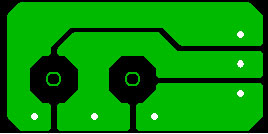
Le micro switch quant à lui est soudé sur un petit circuit imprimé de 5/10ème mm côté cuivre (méthode CMS) dont le typon est représenté ci-dessous.
Le servo-moteur étant en place, vient le placement de la commande en épingle en corde à piano.
Après plusieurs essais et vérification des positions extrêmes, il restera à définir par programmation l'amplitude de la course du servo-moteur de butée à butée, pour qu'elle corresponde au déplacement de la commande de l'aiguille.
Idéalement, les 2 positions doivent être légèrement dépassées pour que les lames d'aiguille soient bien en contact avec le rail, surtout si les lames, comme dans le cas des aiguilles Peco s'alimentent par contact sur le flanc intérieur du rail.
Mais tout dépendra du choix qui sera fait sur la possibilité ou non de talonner l'aiguille. Si on choisit de permettre le talonnage, le réglage devra être souple mais dans ce cas, il ne faudra pas utiliser le micro switch de commutation du cur pour ne pas provoquer de court-circuit.
Si on choisit de ne pas talonner l'aiguille, le réglage pourra être plus dur, surtout si les aiguilles nécessitent un effort important comme les Péco par exemple.
A ce sujet, il est logique de retirer le ressort des aiguilles Péco dont le rôle est de plaquer d'un coup sec les lames d'aiguilles contre les rails, car la notion de mouvement lent et doux perdrait alors tout son sens.
Comme indiqué plus haut, cette description devrait être suivie de celle de la fabrication des décodeurs, en attendant, bon travail !
©CFN - texte, photos et schémas Jean-Marie GILLES